menu
Target
Idea
Originality
Practicability
Applications
Publication
Expense
Japanese
Practicability
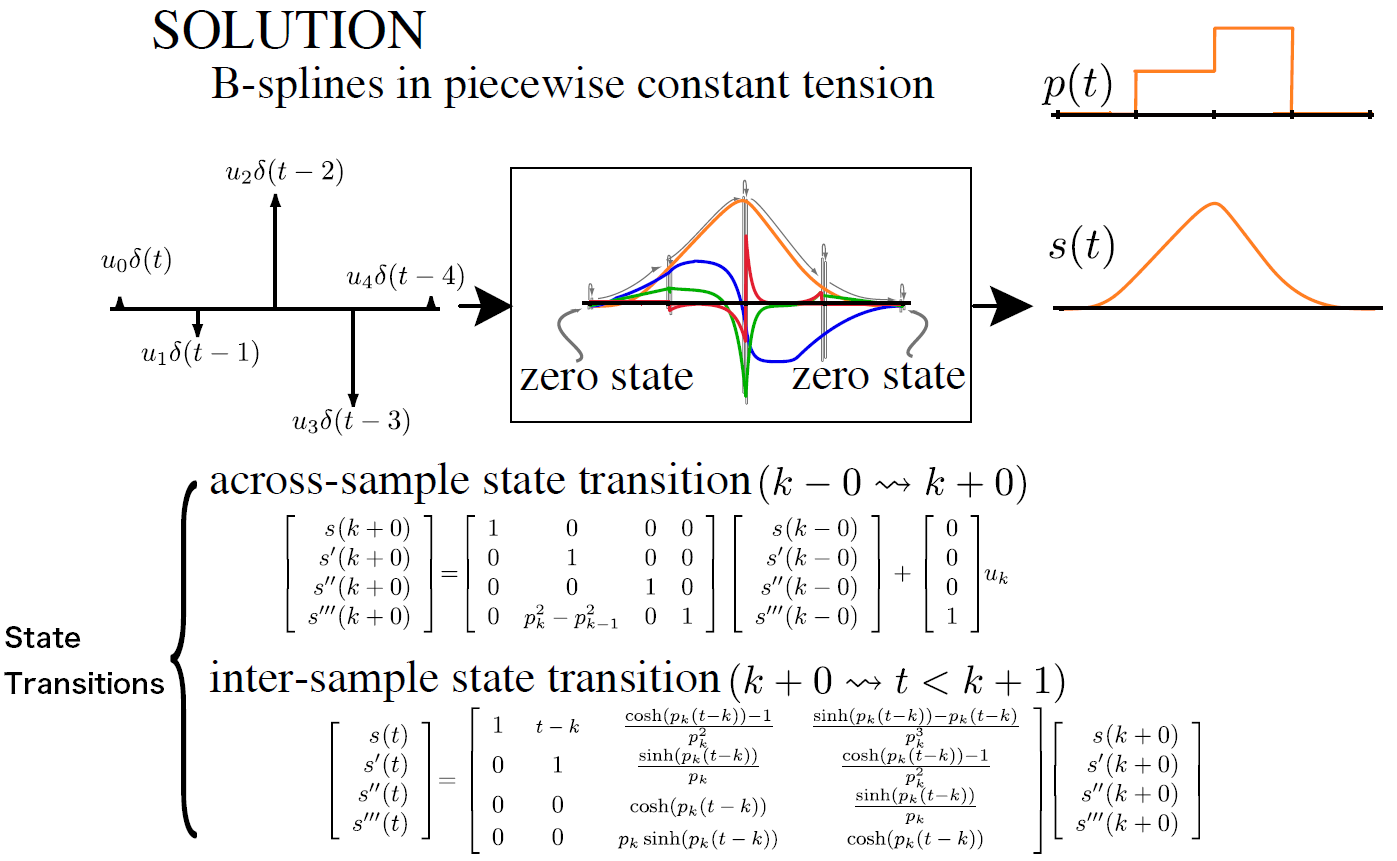
Deriving the locally supported basis functions by means of the dead-beat control of the dynamical system